


Вероватно један од основних пројеката о ардуино Ја сам паркинг сензори. Али овај чланак неће описати стварање уобичајених паркинг сензора, већ паркинг сензоре са ручним подешавањем критичне удаљености. У току стварања овог уређаја повећаћете своје вештине у програмирању кола и програмирања.
Главне компоненте:
• Ардуино Нано / Уно плоча
• ултразвучни сензор растојања ХЦ-ЦР04
• 6 ЛЕД
• 6 отпорника на 220 охма
• 2 отпорника на 10 КОм
• 2 дугмета сата
• пиезо спикер
• делириоус боард
• тата тата жице
• сунђера за ципеле (за случај)
Од алата:
• лемљење
• термо - лепак
Размотрите алгоритам уређаја
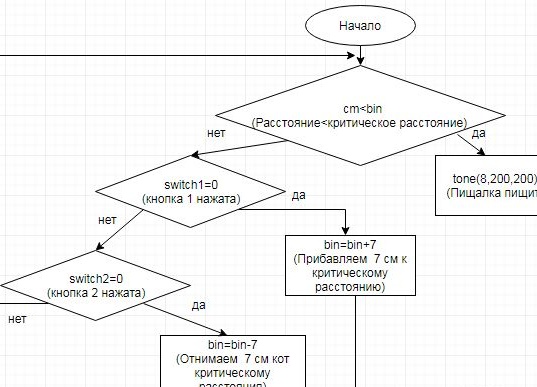
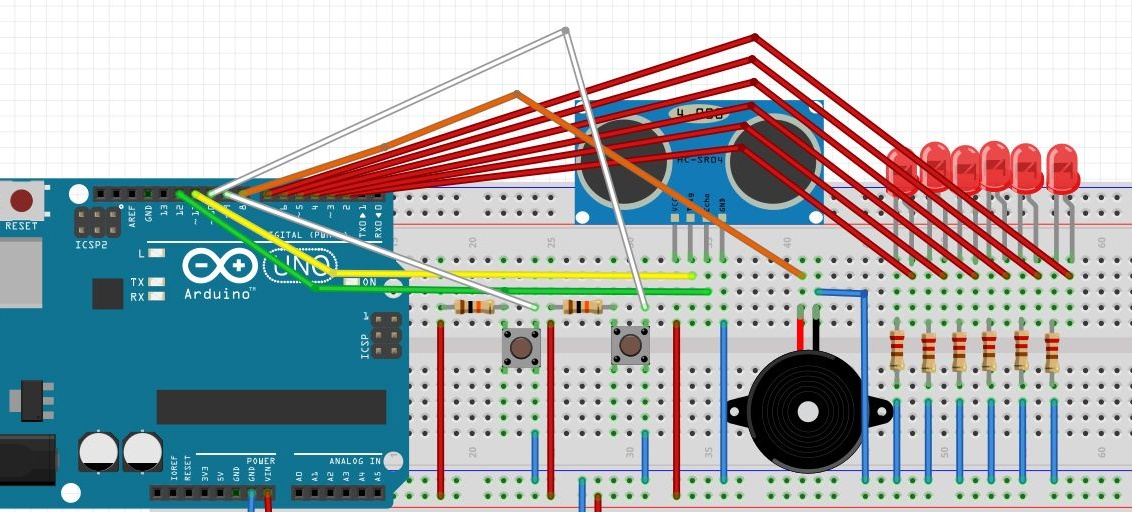
Након прегледа алгоритма, сакупљамо шему на плочи:
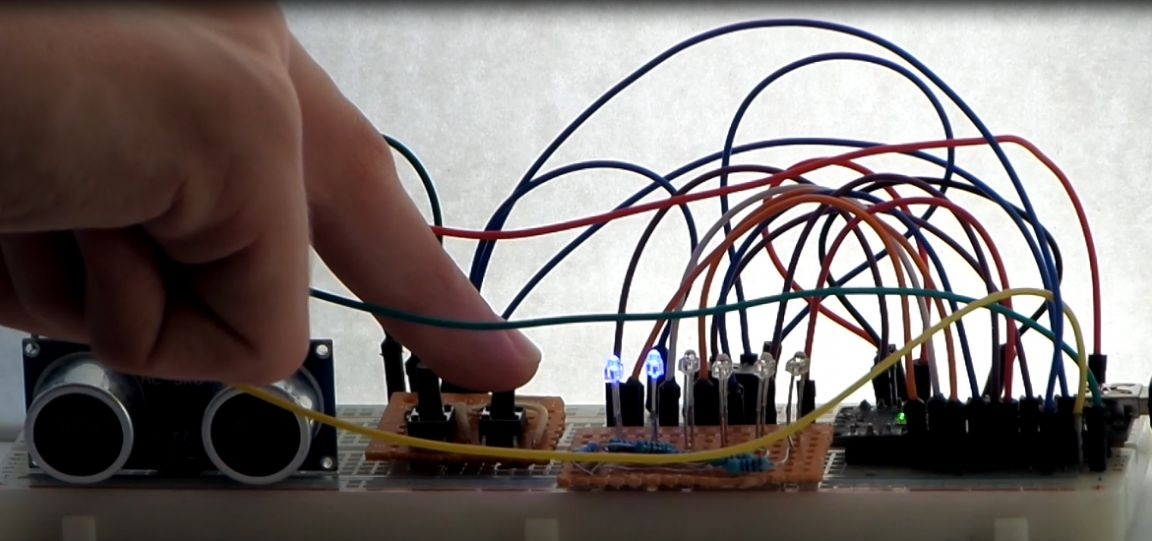
Пошто сам монтирао круг у кућиште, одлучено је да направим мини оклопе тастера и ЛЕД диода.
Кућиште уређаја направљено је од кутије од сунђера за ципеле.
Изгледа да је уређај унутра.

Да видимо шифру.
инт свитцх1 = 9; // Дугме 1
инт свитцх2 = 10; // Дугме 2
инт пин = 2;
инт бин = 40; // Почетна критична удаљеност у центиметрима !!!
инт ецхоПин = 12; // Ецхо пин на ХЦ-СР04 модулу
инт тригПин = 11; // Триг пин на ХЦ-СР04 модулу
инт буз = 8; // Пин твеетер
боолеан лБут1 = ЛОВ;
боолеан лБут2 = ЛОВ;
боолеан цБут1 = ЛОВ;
боолеан цБут2 = ЛОВ;
воид сетуп () {
Сериал.бегин (9600);
пинМоде (тригПин, ОУТПУТ);
пинМоде (ецхоПин, ИНПУТ);
пинМоде (свитцх1, ИНПУТ);
пинМоде (свитцх2, ИНПУТ);
пинМоде (2, ИЗЛАЗ); // ЛЕД 1
пинМоде (3, ИЗЛАЗ); // ЛЕД 2
пинМоде (4, ИЗЛАЗ); // ЛЕД 3
пинМоде (5, ИЗЛАЗ); // ЛЕД 4
пинМоде (6, ИЗЛАЗ); // ЛЕД 5
пинМоде (7, ИЗЛАЗ); // ЛЕД 6
пинМоде (8, ИЗЛАЗ); // Скуеак
}
боолеан дебоунце (боолеан ласт)
{
боолеан струја = дигиталРеад (свитцх1);
ако (последњи! = тренутни)
{
кашњење (5);
цуррент = дигитално читање (свитцх1);
}
повратна струја;
}
боолеан дебоунце2 (боолеан ласт2)
{
боолеан цуррент2 = дигитално читање (свитцх2);
ако (ласт2! = цуррент2)
{
кашњење (5);
цуррент2 = дигитално читање (свитцх2);
}
повратна струја2;
}
воид лооп () {
инт трајање, цм;
дигиталВрите (тригПин, ЛОВ);
делаиМицросецондс (2);
дигиталВрите (тригПин, ХИГХ);
делаиМицросецондс (10);
дигиталВрите (тригПин, ЛОВ);
трајање = пулсИн (ецхоПин, ХИГХ);
цм = трајање / 58;
Серијски отисак (цм);
Сериал.принтлн ("цм");
кашњење (10);
цБут1 = дебоунце (лБут1);
иф (лБут1 == ЛОВ && цБут1 == ХИГХ)
{
пин = пин-1;
канта = канта-7; // Број 7 значи одузимање за 7 цм од критичне удаљености !!!
}
лБут1 = цБут1;
дигиталВрите (пин, ХИГХ);
цБут2 = дебоунце2 (лБут2);
иф (лБут2 == ЛОВ && цБут2 == ХИГХ)
{
пин = пин + 1;
канта = канта + 7; // Број 7 значи додавање 7 цм од критичне удаљености !!!
}
лБут2 = цБут2;
дигиталВрите (пин, ЛОВ);
ако (цм <канта && цм> 0)
{
тон (8.200.200);
кашњење (300);
}
друго
{
ноТоне (8);
}
}Вриједности канте могу бити промијењене у погодније за вас.
Као резултат тога, уређај редовно обавља своје функције.

Овај чланак ће вам помоћи да направите исте сензоре за паркирање без много напора.
Свима желим срећу у понављању овог уређаја. Надам се да вам је мој водич био користан за вас.