

โครงการนี้เหมาะสำหรับผู้ที่มักจะลืมเลี้ยงปลา หรือไม่สามารถทำตรงเวลาได้เสมอ คุณไม่ต้องกังวลเกี่ยวกับสัตว์เลี้ยงตัวน้อยของคุณและยังสามารถออกจากบ้านไปได้ซักพัก
วัสดุ:
- Arduino UNO หรือไมโครคอมพิวเตอร์ที่เข้ากันได้อื่น
- อะแดปเตอร์ 9V หรือ 12V
- มอเตอร์สเต็ป 5V จากไดรฟฟลอปปี้อันเก่า
- พาร์ติชันเรียบ (ใช้จากกล่องเครื่องมือ)
- ก้านโยกเปลี่ยนจากโทรศัพท์บ้าน
- กรณีจากฮาร์ดไดรฟ์ (ทำหน้าที่เป็นภาชนะสำหรับฟีด)
- แผ่นเรียบ (เช่นไม้บรรทัดพลาสติก)
- ขาตั้งกล้องจากกล้องวงจรปิด
- ตัวต้านทาน 10 kOhm
- จับเวลาเครื่องกล AC
ขั้นตอนแรก สภากรณี:
การออกแบบชุดประกอบแสดงในรูปแรก รูถูกตัดออกที่ด้านหนึ่งของกล่องหุ้มฮาร์ดไดรฟ์ สำหรับส่วนนี้ของอุปกรณ์ป้อนอาหารคุณสามารถใช้ขวดพลาสติกได้อย่างไรก็ตามคุณจะต้องได้รับการสนับสนุนเพื่อให้ขวดคว่ำลง
ผู้เขียนใช้ขาตั้งกล้องจากกล้องวงจรปิดเนื่องจากมีความสูงในอุดมคติสำหรับการติดตั้งสเต็ปเปอร์มอเตอร์ไว้ข้างใต้ สิ่งที่เหลืออยู่ก็คือการเจาะรูในกล่อง
มอเตอร์สเต็ป 5V ที่มีกลไกขับเคลื่อนที่ใช้ในการเคลื่อนย้ายเลนส์ขับเคลื่อนถูกใช้เพื่อย้ายฝาครอบ มีการแบ่งพาร์ติชันที่เรียบจากกล่องด้านบนของที่ใส่เลนส์ใต้รูที่ควรปล่อยเม็ดฟีด สำหรับสิ่งนี้ขอแนะนำให้ใช้ไม้บรรทัดที่หัก ปล่อยหนึ่งมิลลิเมตรจากด้านล่างของตัวถังเพื่อให้เม็ดอาหารสามารถผ่านฝาปิดได้


ขั้นตอนที่สอง การปรับเปลี่ยนของร่างกาย:
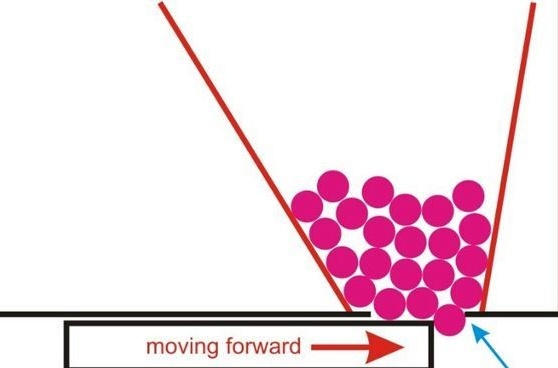
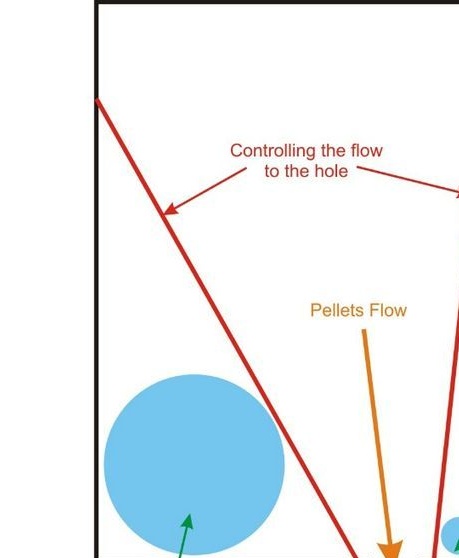
แผนภาพต่อไปนี้แสดงวิธีที่ฟีดควรผ่านรูอย่างถูกต้องเพื่อให้เม็ดไม่คงอยู่ในมุมทางออกของฟีด
หลังจากใช้งานไปแล้วสองวันผู้เขียนตระหนักว่าฟีดบางส่วนติดอยู่ แต่ไม่ได้ออกมาตามที่ตั้งใจ นั่นคือเหตุผลที่เราต้องการไม้บรรทัดหรือแผ่นเรียบที่พอดีกับภาชนะและในรูปของตัวอักษร V

ขั้นตอนที่สาม อิเล็กทรอนิกส์ ส่วนหนึ่งของเครื่องป้อน:
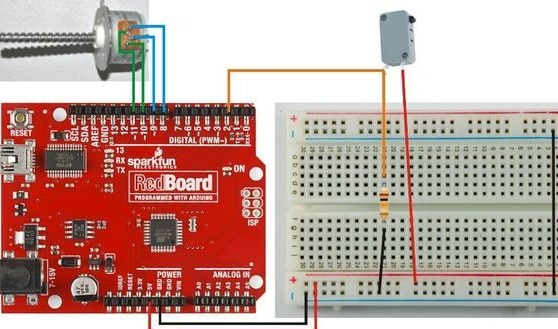
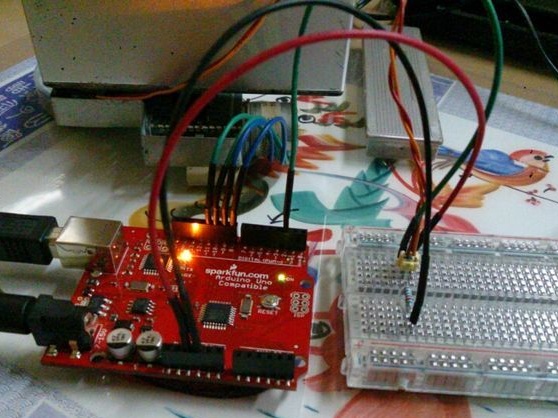
ติดตั้งสเต็ปเปอร์มอเตอร์ตัวต้านทาน 10 k are และสวิตช์ตามที่แสดงในแผนภาพด้านล่าง เพื่อความสะดวกในการทำความเข้าใจเกี่ยวกับการทำงานของวงจรและการทดสอบจะมีการใช้เขียงหั่นขนมมันจะหายไปในการประกอบขั้นสุดท้าย (ตัวอย่างในภาพสุดท้าย)
สายมอเตอร์สี่เส้นเชื่อมต่อกับพินดิจิตอล 8-11 เท้าข้างหนึ่งสลับไปที่กำลังไฟ 5V ในทางกลับกันขาที่สองเชื่อมต่อกับพื้นโดยใช้ตัวต้านทาน 10 kΩและเชื่อมต่อกับขาดิจิตอล 2
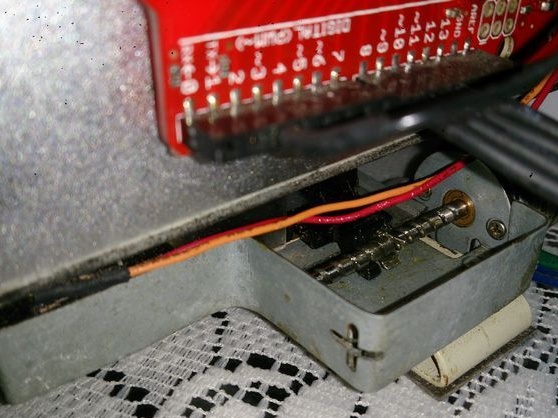
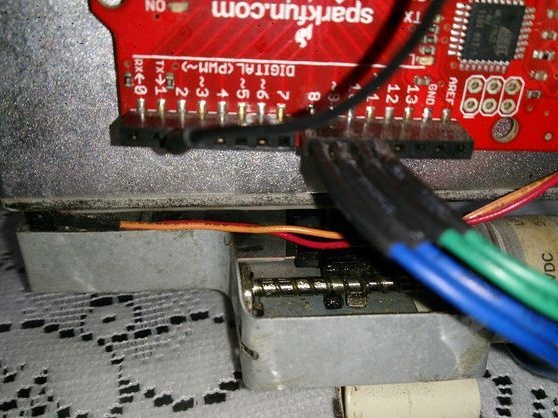
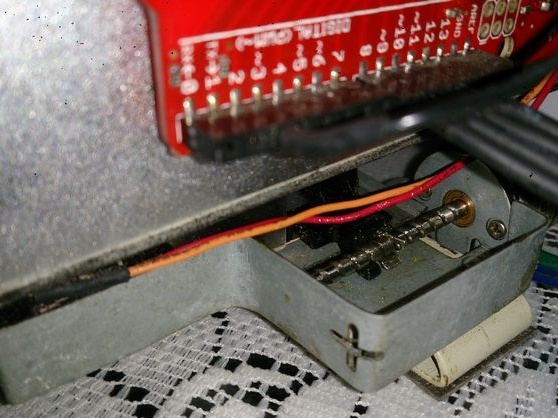
สวิตช์วางอยู่ด้านหน้าของฝาครอบที่เคลื่อนย้ายได้และชิ้นส่วนโลหะโค้งงอดังนั้นจึงสร้างตัวหยุด (สายสีแดงและสีส้มในภาพที่สาม) เมื่อสวิตช์เคลื่อนที่ไปข้างหน้าและกดหยุด Arduino จะลงทะเบียนค่าสูงและหยุดเครื่องยนต์
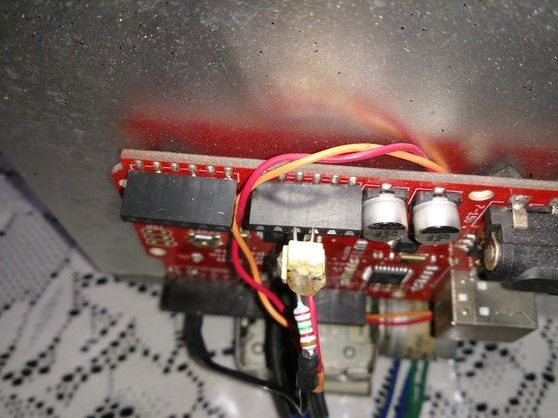
บอร์ดติดอยู่ด้านหลังของกล่องด้วยเทปไฟฟ้าและปลั๊กที่มีตัวจับเวลาอยู่ด้านข้าง พวกเขาจะใช้เพื่อความสมดุลกรณีเพื่อให้มันอยู่ในตำแหน่งที่ถูกต้อง
ทดสอบการทำงาน ทำที่บ้าน ไม่มีภาชนะบรรจุอาหาร:
วิดีโอต่อไปนี้แสดงการทำงานของอุปกรณ์ที่ประกอบอย่างสมบูรณ์ อย่างที่คุณเห็นเอาท์พุทฟีดแรกนั้นถูกต้อง ที่ทางออกที่สองของฟีดจะเห็นได้ว่าหากแกรนูลติดอยู่และฝาปิดไม่สนิทจากนั้นฟีดจะเลื่อนไปข้างหน้าและย้อนกลับจนกว่าจะปิดอย่างถูกต้อง
รหัสโปรแกรม: