

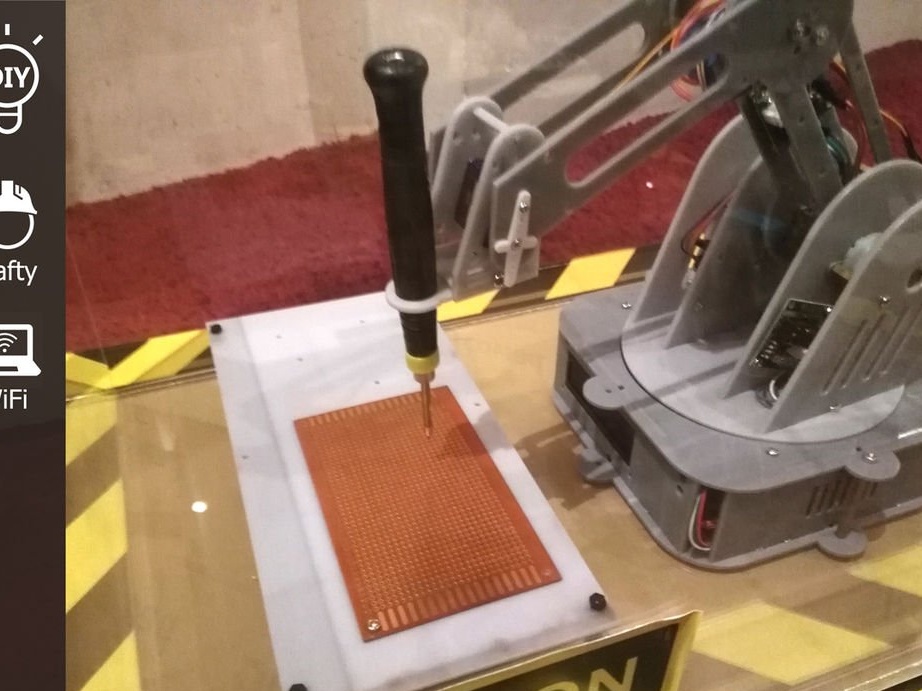

Sa kasamaang palad, ang materyal na ito ay hindi hilahin sa isang buong artikulo, samakatuwid, nagpasya akong ilagay ito sa "mga tip", marahil ang isang tao ay maaaring mangailangan ng materyal. Sinasabi ng artikulo kung paano ibebenta electronic mga sangkap sa isang nakalimbag na circuit board gamit ang isang awtomatikong braso ng manipulator.
Ang ideya ng proyekto ay dumating sa isipan ng panginoon nang pag-aralan niya ang iba't ibang mga posibilidad ng robotic manipulators, at pagkatapos ay natuklasan na maraming mga sumasakop sa lugar ng awtomatikong hinang at paghihinang ng isang robotic manipulator.
Mga tool at materyales:
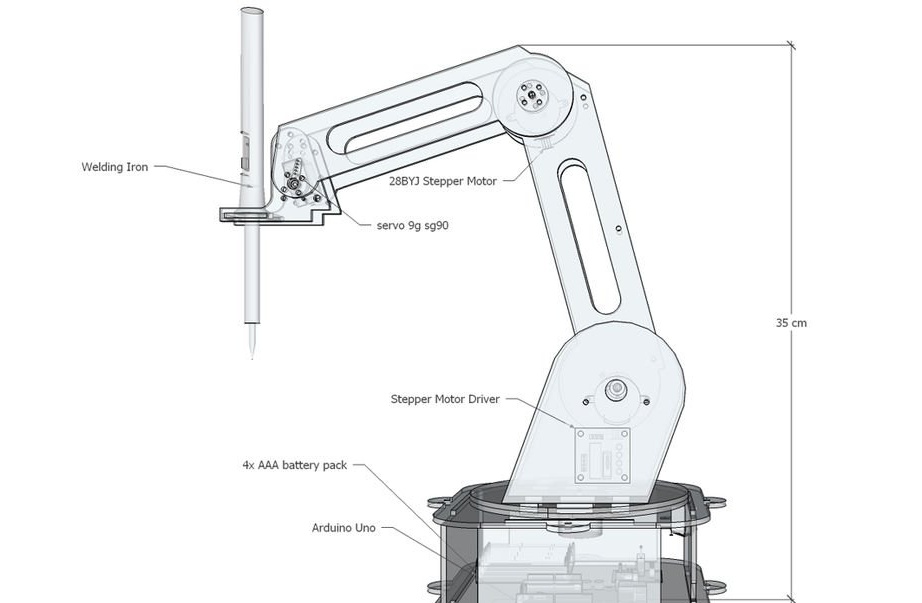
-Step motor 28BYJ-48 kasama ang module ng driver ULN2003;
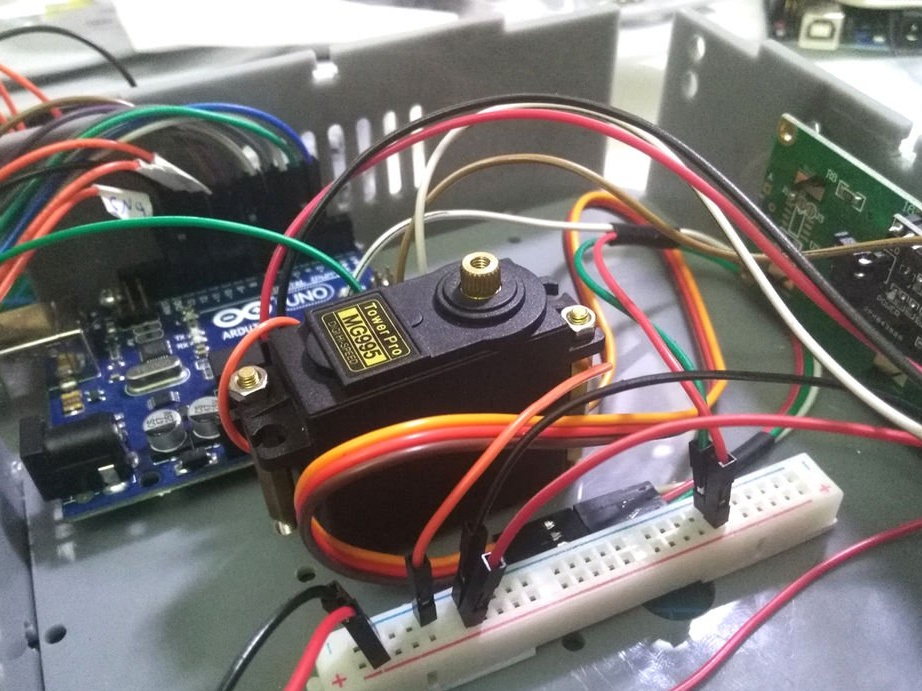
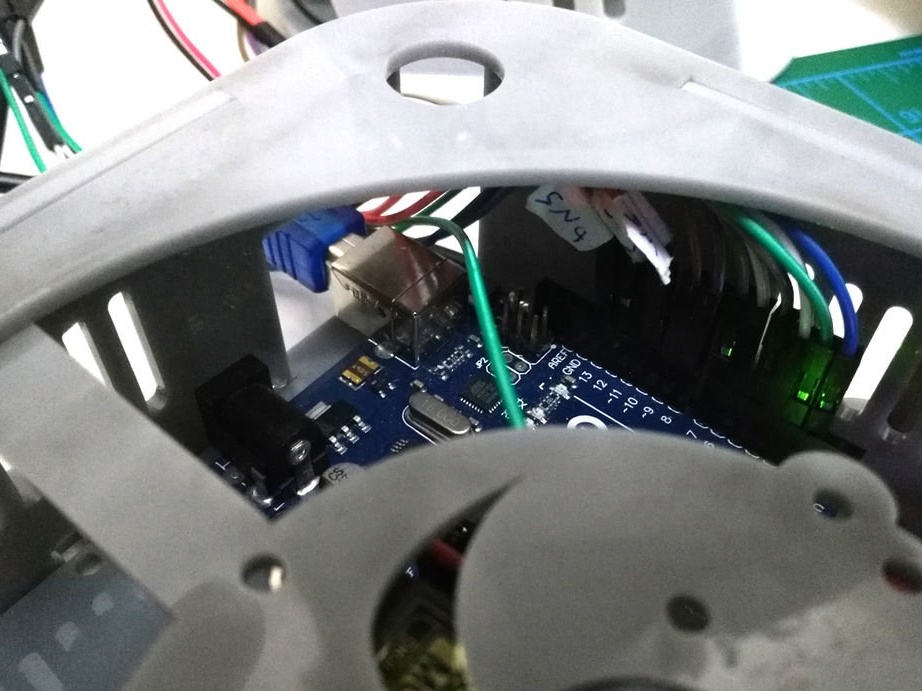
- Arduino Uno R3;
Servo-motor MG-90S;
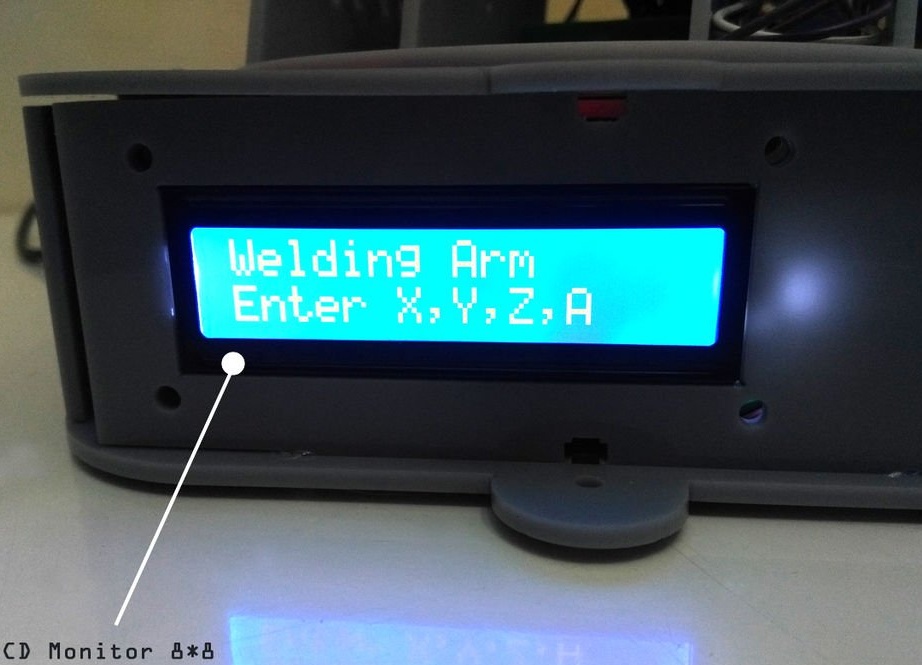
- LCD 1602;
-Board;
- pagkonekta ng mga wire;
- Pagbaba ng converter;
-Servox SC-1252MG $ Servo Drive
-Fastener;









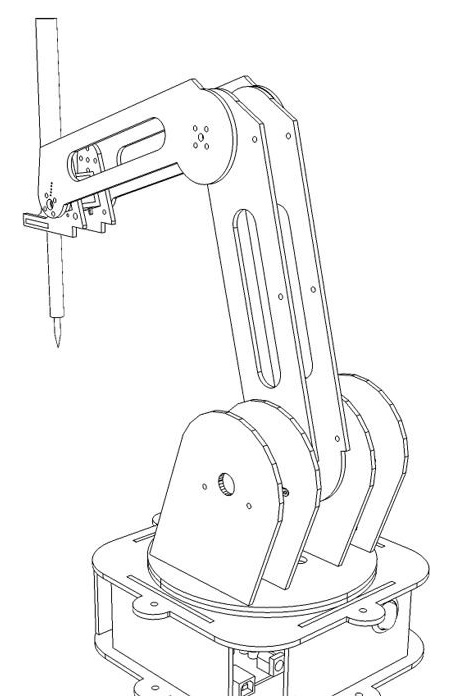
Una na binuo ng wizard ang proyekto. Ang bahagi ng mga detalye ay pinutol sa isang CNC machine na may laser.
Pagkatapos tipunin ang lahat ng mga bahagi, lumitaw ang maraming mga problema:
1. Ang mga lever ay masyadong mabigat para makontrol ang maliit na motor ng stepper.
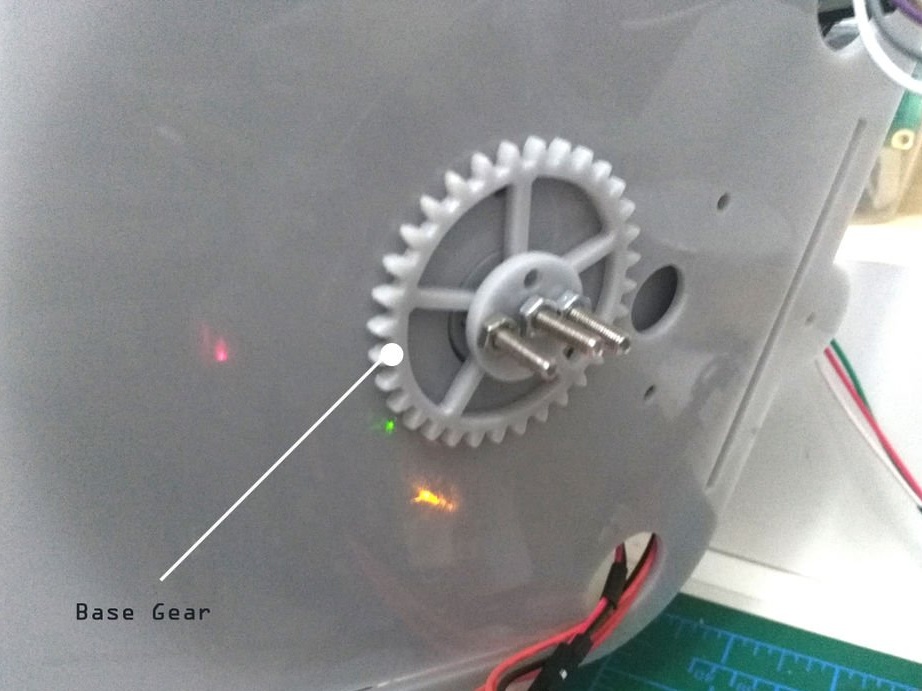
2. Dahil ang modelo ay gawa sa plastik, ang alitan ng umiikot na base ay mataas, at ang mga paggalaw ay hindi makinis.
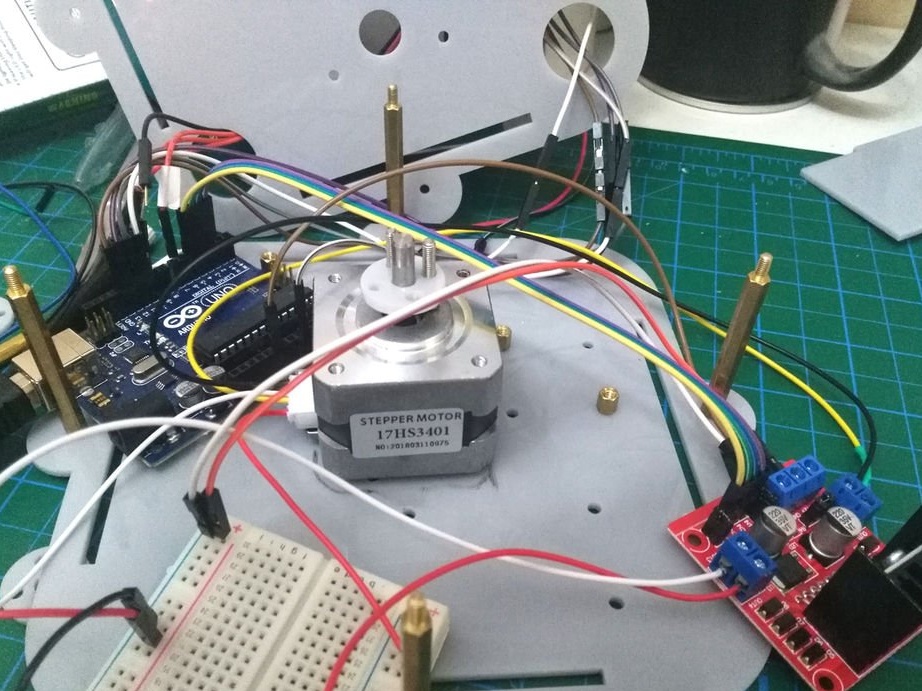
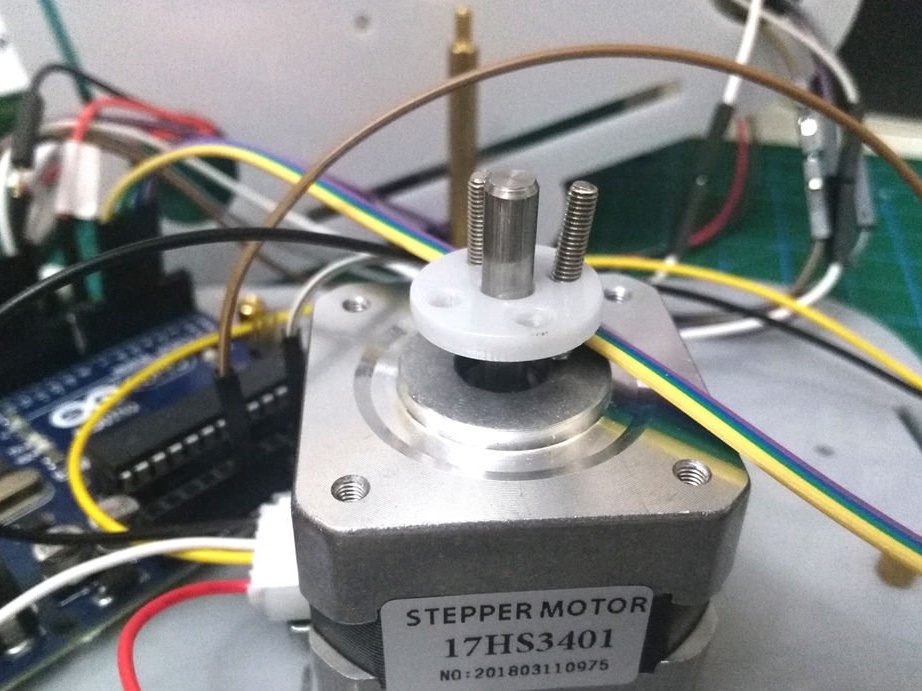
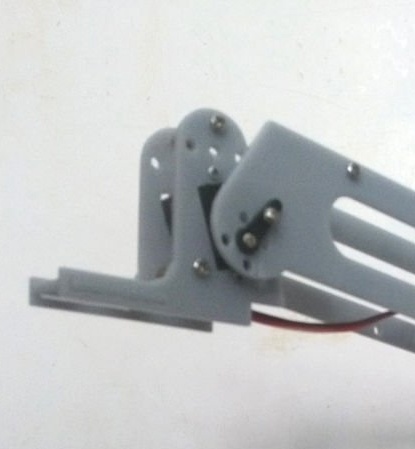
Ang unang solusyon ay ang pagbili ng isang mas malaking motor ng stepper na may kakayahang makaligtaan ang timbang at alitan, at muling binawi ng master ang base para sa pag-install ng isang mas malaking motor na stepper.
Ngunit ang problema ay hindi nawala, at pagkatapos ay ganap na binago ng master ang pangunahing disenyo at naka-install ng isang servomotor na may isang gearbox at metal na gears.
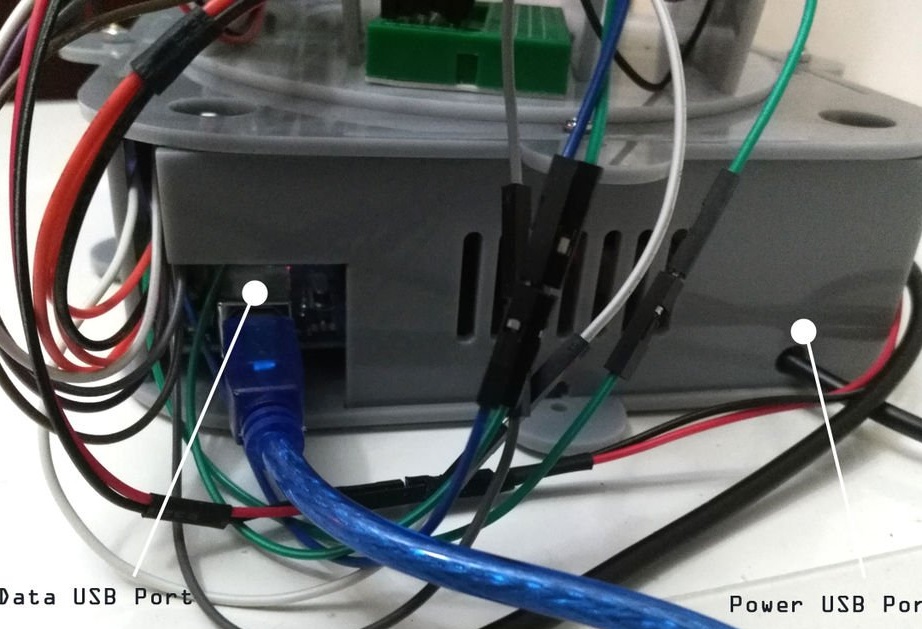
3. Ang boltahe.
Ang Arduino ay maaaring makatanggap ng kapangyarihan alinman sa DC power connector (7-12 V), ang USB connector (5 V), o mula sa VIN pin ng board (7-12 V). Ang supply ng boltahe sa pamamagitan ng 5 V o 3.3 V contact sa pamamagitan ng mga regulator, at nagpasya ang master na bumili ng isang espesyal na USB cable na sumusuporta sa 5 V mula sa isang PC o anumang mapagkukunan ng kuryente.
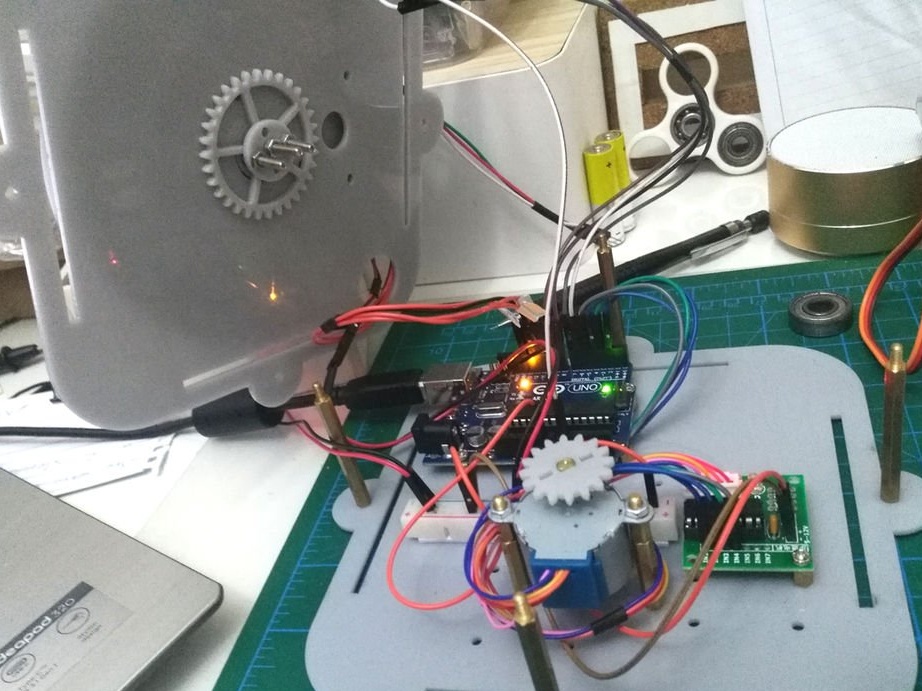

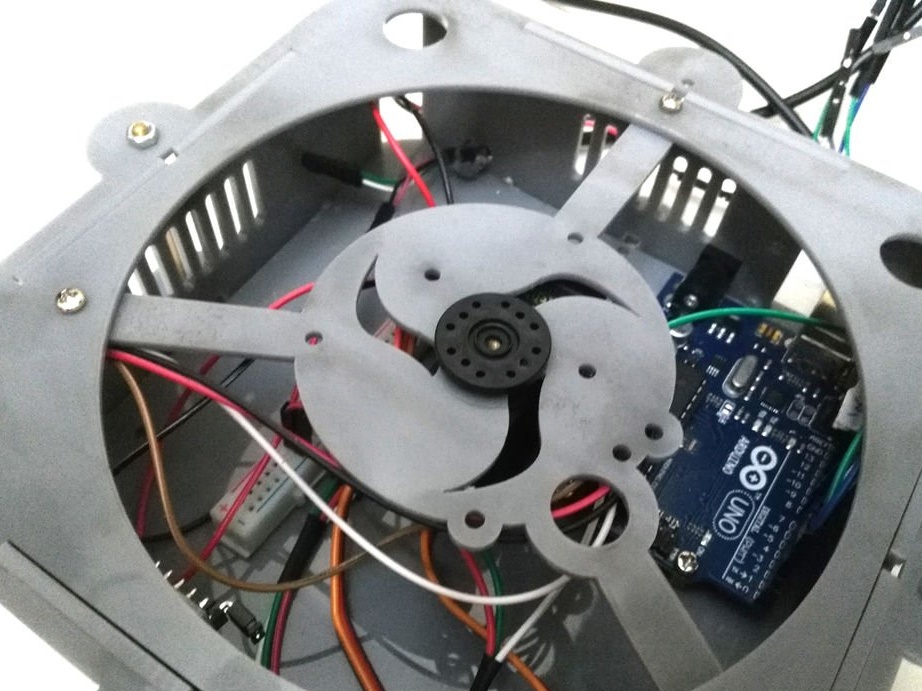
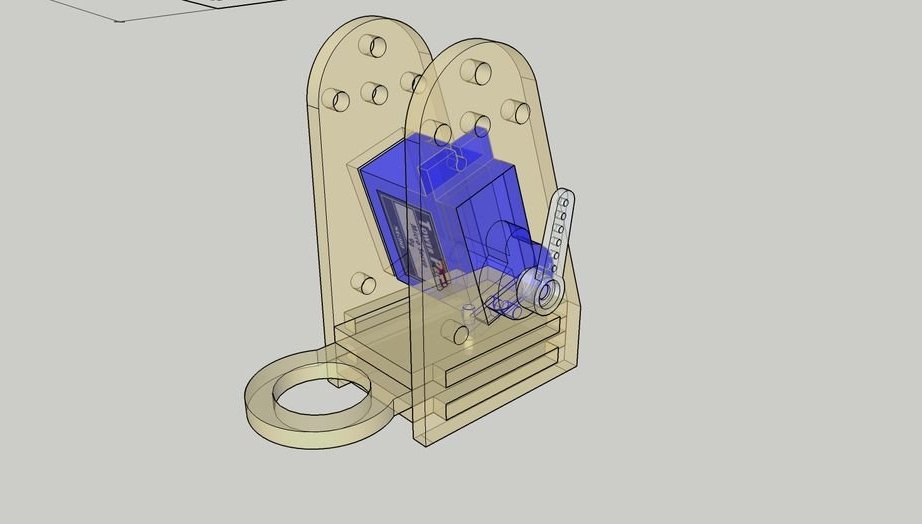
Matapos ang ilang mga pagbabago, binago ng master ang disenyo ng modelo, binabawasan ang laki ng mga bracket at gumawa ng isang angkop na butas para sa servo motor gearbox, tulad ng ipinapakita sa larawan.

Upang hawakan ang paghihinang iron, gumawa ang master ng isang espesyal na bundok.Para sa tamang operasyon, kinakailangan ang isang servomotor na may isang parameter ng pag-ikot ng 180 degree.

Ang code ay maaaring ma-download sa ibaba.

ProjectCodeFirst.ino
Ang mga highlight ng paggawa ng aparato ay makikita sa video.
Siyempre, walang sapat na impormasyon, walang circuit, walang mga file para sa CNC, walang mga halimbawa ng aparato, ngunit mayroong isang magandang ideya at marahil isang interesado na wizard, batay sa ideyang ito, gagawa siya ng isang ganap na functional na aparato.