
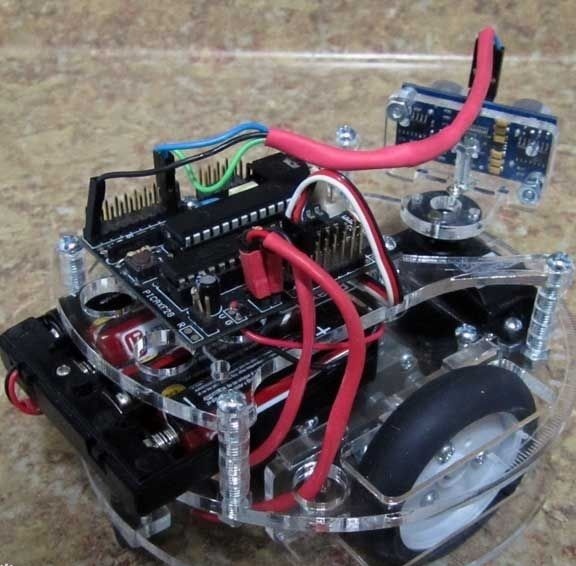
Tính năng chính của robot này là nó có thể tránh được mọi chướng ngại vật. Để điều chỉnh tốt hơn và dễ dàng hơn cho robot trên boong của nó, có một tỷ lệ với góc tới 90 độ. Kích thước nền tảng của robot là 5 inch, nó cũng được trang bị sonar.
Đối với nguồn điện, các kết hợp khác nhau có thể được sử dụng ở đây, pin có thể được sử dụng.


Trong các bài kiểm tra người máy cho thấy kết quả tuyệt vời cả trên một đường thẳng và trên một bề mặt nghiêng. Nó có thể thực hiện một loạt các chức năng và có thể được trang bị nhiều loại linh kiện.
Cắt bỏ có thể được nhìn thấy trên cột buồm hàng đầu của robot, chúng là cần thiết để nhận xung âm thanh. Có các cảm biến hồng ngoại trên robot, chúng phải giống nhau.
Tác giả đã sử dụng Tamiya 70097 làm động cơ cho robot. Đối với các bánh xe, chúng được lấy từ Tamiya 70145. Ngoài ra, bạn có thể sử dụng servo siêu nhỏ hoặc tiêu chuẩn với bộ chuyển đổi.
Vật liệu và công cụ để sản xuất robot:
- các bộ phận robot cắt laser;
- ống co, dây, đầu nối;
- bu lông 41,25 "# 6-32 (chúng có thể được mua tại các cửa hàng phần cứng);
- 2,75 "# 4-40 bu lông;
- 42 "# 6-32 bu lông;
- 4,5 "# 4-40 bu lông;
- một ổ đĩa servo và tất cả các thành phần cho nó (vi mô, nhưng tiêu chuẩn là tốt nhất);
- cảm biến hồng ngoại hoặc sonar (trong trường hợp này là PING);
- loại động cơ Tamiya 70097;
- bánh xe của Tamiya 70145;
- vi điều khiển Arduino (trong trường hợp này, Picaxe 28x1 được sử dụng).

Để giảm hàn đến mức tối thiểu, có thể sử dụng ổ servo tiên tiến. Vì vậy, sẽ có thể tránh hàn hai tiếp điểm trên mỗi động cơ. Ngoài ra, động cơ có thể được kết nối thông qua các đầu nối uốn, sau đó bạn hoàn toàn có thể quên về hàn. Nhưng để robot hoạt động tốt hơn, nên hàn các tiếp điểm một cách đáng tin cậy.
Đối với những mục đích này, bạn vẫn cần phải dự trữ với một hàn sắt, vạn năng, tua vít và như vậy.
Quy trình lắp ráp robot:
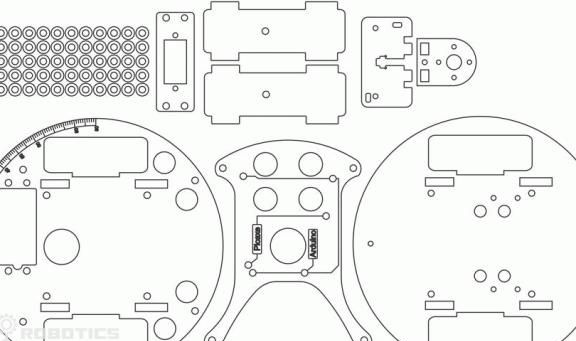
Bước đầu tiên. Cắt bỏ các yếu tố chính của cơ thể
Trước hết, sử dụng tia laser, bạn cần cắt bỏ các yếu tố chính của cơ thể robot. Đối với các mục đích này, bạn phải sử dụng các bản vẽ kèm theo bài viết.
Bước hai Chúng tôi học điện tử mạch robot
Trong hình bên dưới, bạn có thể thấy tất cả các yếu tố của robot được kết nối. Bộ điều khiển PICAXE và động cơ Tamiya 70097 được lấy làm ví dụ. Sau khi cài đặt chương trình cơ sở và kết nối robot, nó sẽ ngay lập tức bắt đầu hoạt động như bình thường.
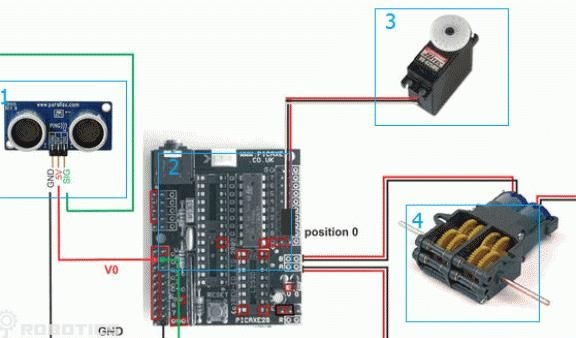
Dưới số 1 trong hình được đánh dấu là sonar Parallax PING. Dưới số 2 là bảng Pall Parallax. Số 3 biểu thị động cơ servo tiêu chuẩn và động cơ số 4 Tamiya 70097.
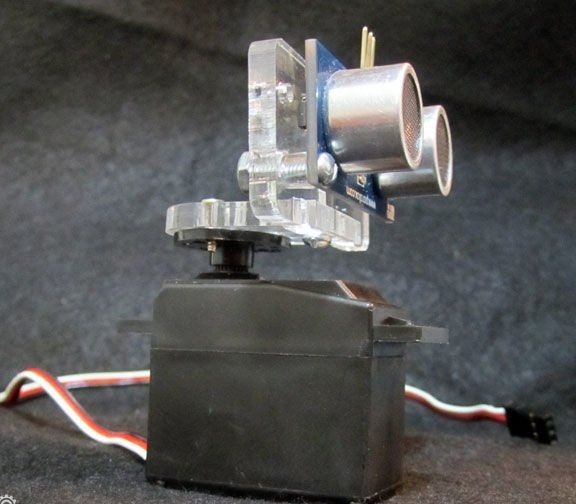
Bước ba Lắp ráp mắt robot
Việc lắp ráp robot bắt đầu với điều thú vị nhất, từ việc lắp ráp sonar. Để cài đặt nó, cần có 1, 75 "bu lông, 2, 5" bu lông, 2 miếng đệm và ba đai ốc. Việc lắp ráp được lắp ráp rất đơn giản, nền tảng nhựa được gắn vào động cơ servo và các cảm biến được cài đặt trên đó, đó là "đôi mắt" của robot. Vì vậy, anh ta sẽ có thể xoay chúng và nhìn xung quanh.

Bước bốn Cài đặt động cơ servo
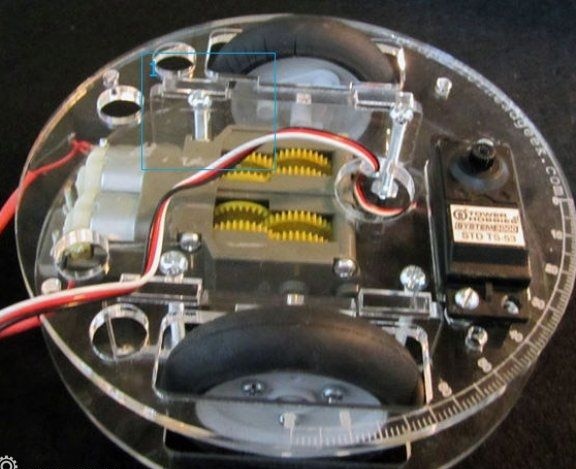
Động cơ servo phải được gắn chắc chắn ở tầng trên tại vị trí được chỉ định. Đối với những mục đích này, bạn sẽ cần bu lông với đai ốc có kích thước 2 .5 ". Trong hình bạn có thể thấy động cơ được cài đặt sẽ trông như thế nào.

Ở cùng một giai đoạn, bạn cần gắn vi điều khiển vào bảng vận chuyển. Đối với điều này, bạn sẽ cần 1,75 "ốc vít, miếng đệm và đai ốc.
Bước năm Đặt tầng dưới
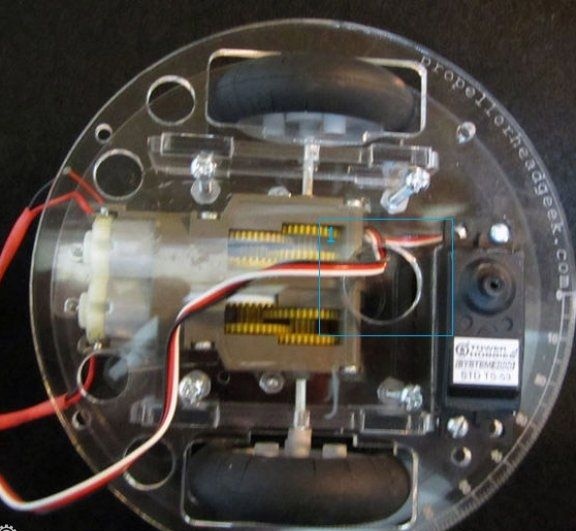
Động cơ, cùng với các bánh xe và bánh xe, cần được gắn vào như một yếu tố không thể thiếu cho tầng dưới của robot. Đối với những mục đích này, bạn cần tìm những bu lông và đai ốc đi kèm với động cơ. Nhiều bu lông với đai ốc phải được lắp đặt ở cả hai đầu của nền tảng. Đối với mục đích yên tĩnh, bạn cần sử dụng bu lông và đai ốc có kích thước 2 .5 ".
Trong ảnh, bạn có thể thấy tất cả các yếu tố được gắn vào boong của robot.
Bước sáu Kết nối các sàn
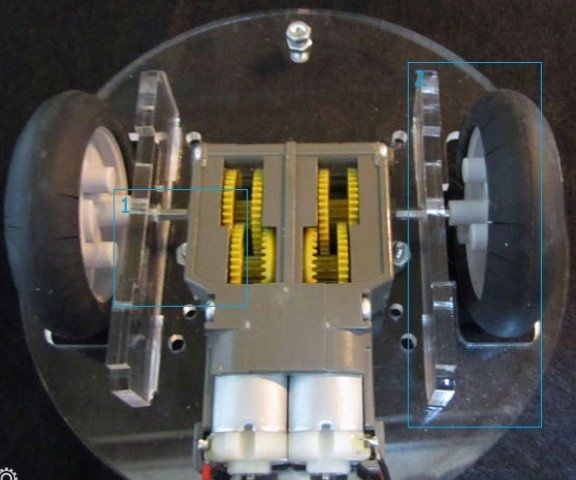
Bây giờ bạn cần kết nối hai sàn với nhau. Đối với những mục đích này, bu lông có đai ốc 41,25 "được sử dụng. Theo số 1, bạn có thể thấy bu lông 1,25".
Dây của động cơ servo phải được dẫn ra ngoài qua lỗ trên bục.
Bước thứ bảy. Lắp thẻ nhớ
Bảng vận chuyển được gắn vào tầng trên của robot. Đối với những mục đích này, bạn sẽ cần bu lông với các đai ốc 41,25 ", cũng như 20 miếng đệm. Ngoài ra, có thể sử dụng các miếng đệm hình lục giác 1". Với sự giúp đỡ của họ, sẽ có thể nhanh chóng thay đổi chiều cao của boong để cài đặt các loại nguồn năng lượng khác nhau.

Bước Tám. Lắp đặt sonar và động cơ servo
Một trận đấu với sonar được kết nối với bộ điều khiển và nó được gắn vào trục của động cơ servo bằng cách sử dụng các bu lông đặc biệt đi kèm với bộ sản phẩm. Vâng, cuối cùng, bạn cần phải cài đặt một pin, cho những mục đích này, bạn có thể sử dụng băng hoặc keo.
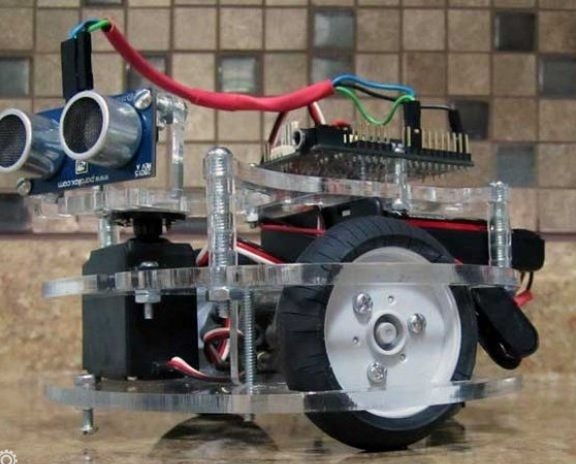
Đó là tất cả, robot đã sẵn sàng. Sau khi cài đặt phần sụn và kết nối nguồn, nó sẽ ngay lập tức hoạt động. Trong tương lai, robot sẽ có thể cải thiện hoặc thêm các chức năng mới khác nhau.