

Xin chào khách truy cập trang web
Trong khi duyệt các trang web khác nhau, tôi đã tìm thấy một sản phẩm làm tại nhà rất hữu ích cho an ninh gia đình, trên hệ thống Arduino.
Tác giả của nó muốn tạo ra một sản phẩm tự chế để nó rẻ và không dây.
Sản phẩm tự chế này sử dụng cảm biến chuyển động Pir và thông tin được truyền bằng mô-đun RF.

Tác giả muốn sử dụng một mô-đun hồng ngoại, nhưng vì nó có phạm vi hạn chế và cộng có thể hoạt động chỉ trên đường ngắm của máy thu, vì vậy anh ta đã chọn mô-đun RF, với đó bạn có thể đạt được phạm vi khoảng 100 mét.

Để thuận tiện hơn cho khách truy cập xem lắp ráp báo thức, tôi quyết định chia bài viết thành 5 giai đoạn:
Bước 1: Tạo một máy phát.
Giai đoạn 2: Tạo máy thu.
Bước 3: Cài đặt phần mềm.
Giai đoạn 4: Kiểm tra các mô-đun lắp ráp.
Giai đoạn 5: Lắp ráp vỏ và lắp đặt mô-đun trong đó.
Vì vậy, hãy bắt đầu với video của tác giả.
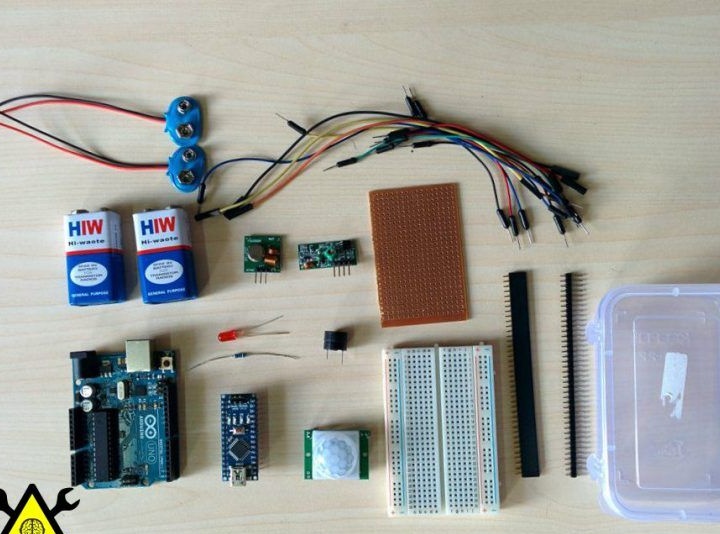
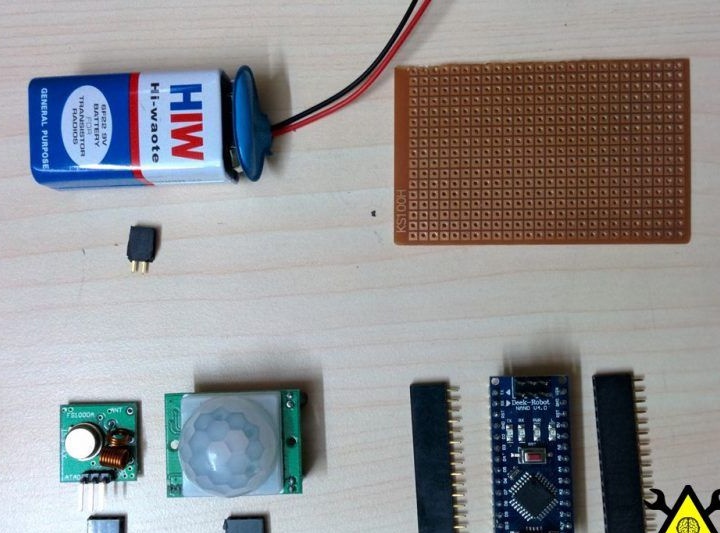
Tất cả những gì tác giả cần là:
- 2 bảng ARDUINO UNO / ARDUINO MINI / ARDUINO NANO cho máy thu và máy phát;
- Mô-đun thu phát RF (433 MHZ);
- Cảm biến chuyển động Pir;
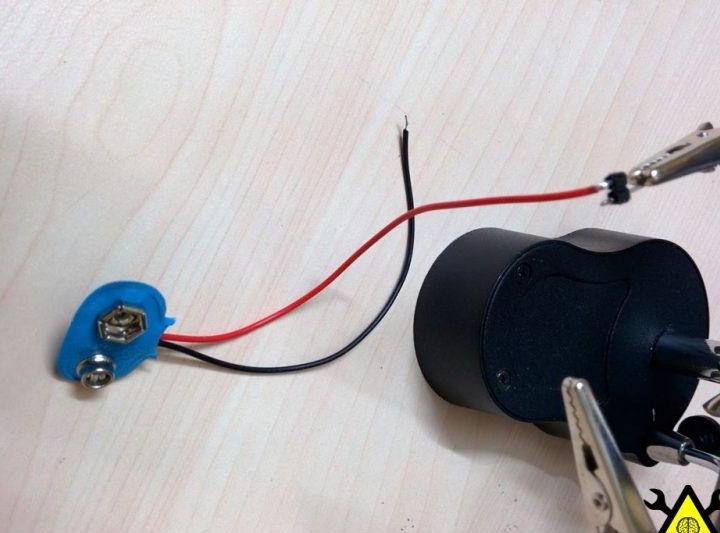
- Pin 9V (2 miếng) và đầu nối với chúng;
- tiếng chuông;
- Đèn LED;
- Một điện trở có điện trở 220 ohms;
- bánh mì;
- Nhảy / dây / nhảy;
- Tấm lắp;
- Ban để kết nối pin;
- công tắc;
- Vỏ cho máy thu và máy phát;
- Giấy màu;
- Băng dính;
- Dao mổ xếp chồng lên nhau;
- Súng bắn keo nóng;
- Hàn sắt;
- Kềm / công cụ tước;
- Kéo cho kim loại.
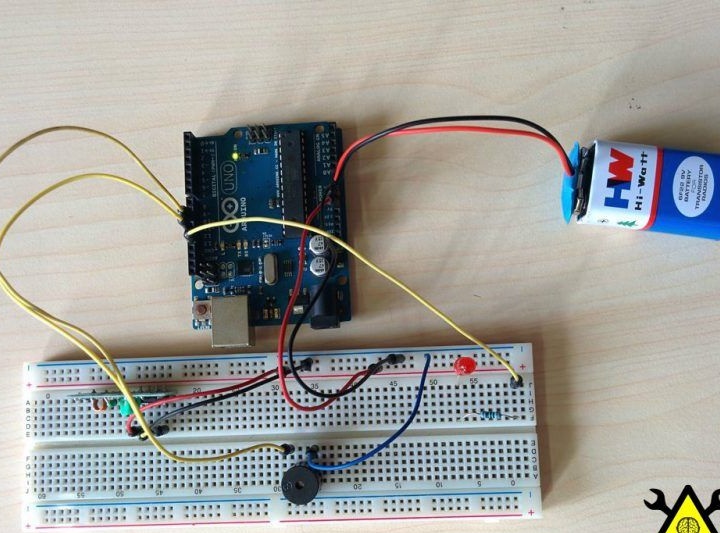
Chúng tôi bắt đầu tạo ra các máy phát.
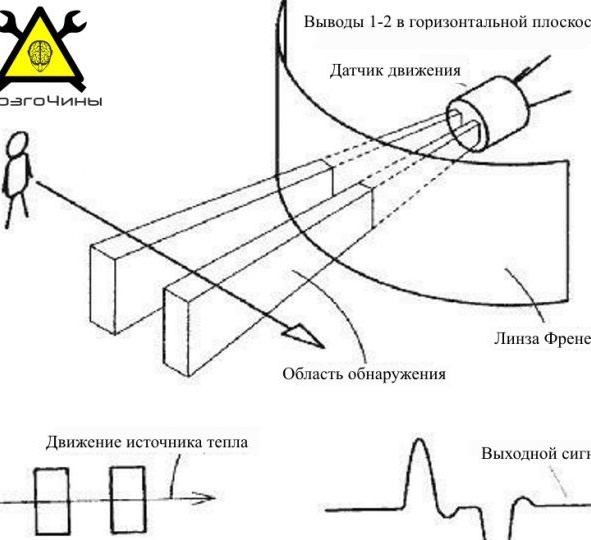
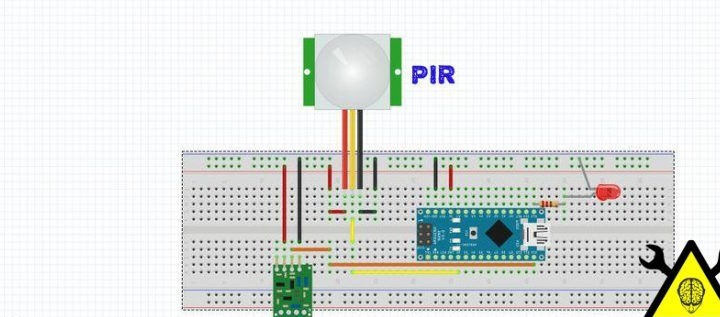
Dưới đây là sơ đồ của cảm biến chuyển động.
Bản thân máy phát bao gồm:
- cảm biến chuyển động;
- Bảng mạch Arduino;
- Mô-đun máy phát.
Tác giả đã sử dụng Arduino Nano làm bảng điều khiển.
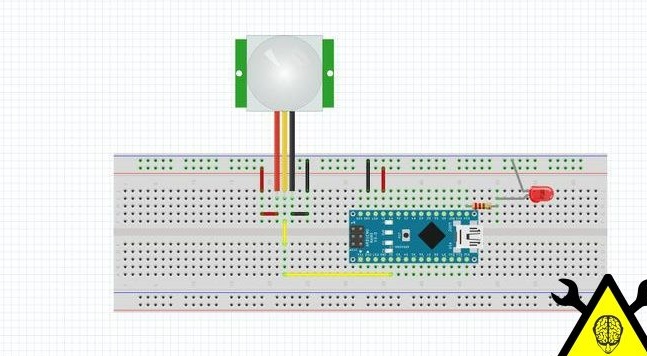
Các tác giả thu thập theo chương trình này:
Bản thân cảm biến có ba đầu ra:
- VCC;
- GND;
- HẾT.
Sau đó, tác giả đã kết nối các kết luận của cảm biến với kết luận của bảng Arduino:
- Vcc> 5v;
- GND> GND;
- Ra> D2.
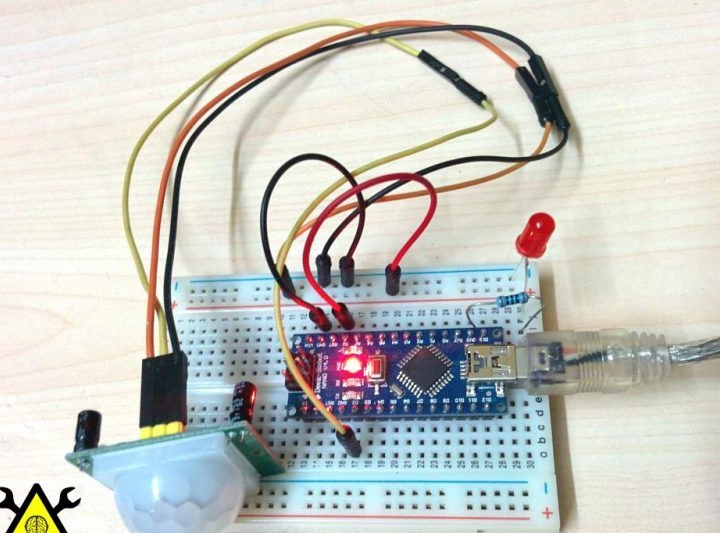
Sau đó, tôi kiểm tra cảm biến

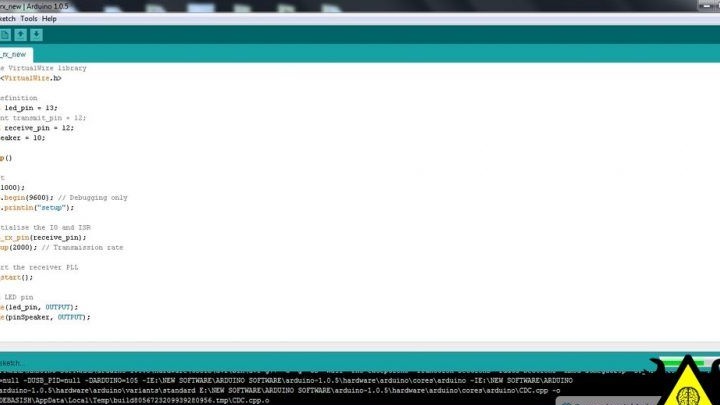
Trước khi tải xuống phần sụn, tác giả đảm bảo rằng bo mạch hiện tại và cổng nối tiếp được cài đặt chính xác trong cài đặt Arduino IDE. Sau đó tôi đã tải về bản phác thảo:
Xem tập tin trực tuyến:
Sau đó, khi cảm biến chuyển động phát hiện chuyển động trước mặt bạn, đèn LED sẽ sáng lên và bạn cũng có thể thấy thông báo tương ứng trong màn hình.
Tiếp theo, tác giả kết nối Máy phát RF.
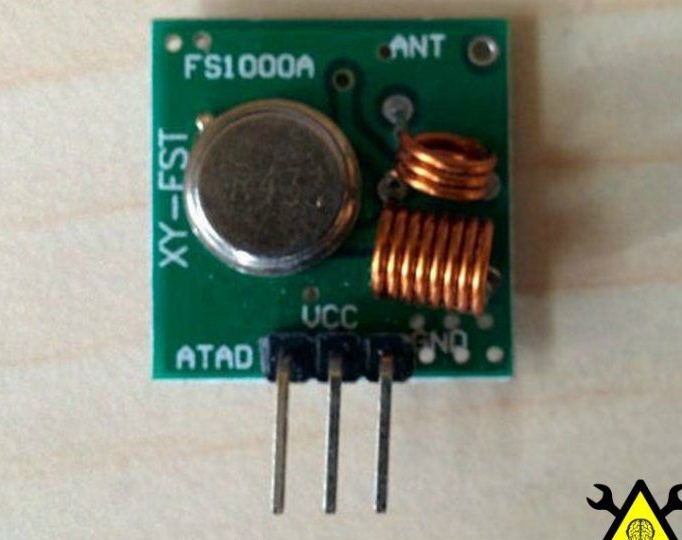
Theo sơ đồ thấp hơn một chút.
Máy phát có 3 đầu ra (VCC, GND và Dữ liệu), kết nối chúng:
- Đầu ra VCC> 5V trên bảng;
- GND> GND;
- Dữ liệu> 12 pin trên bảng.
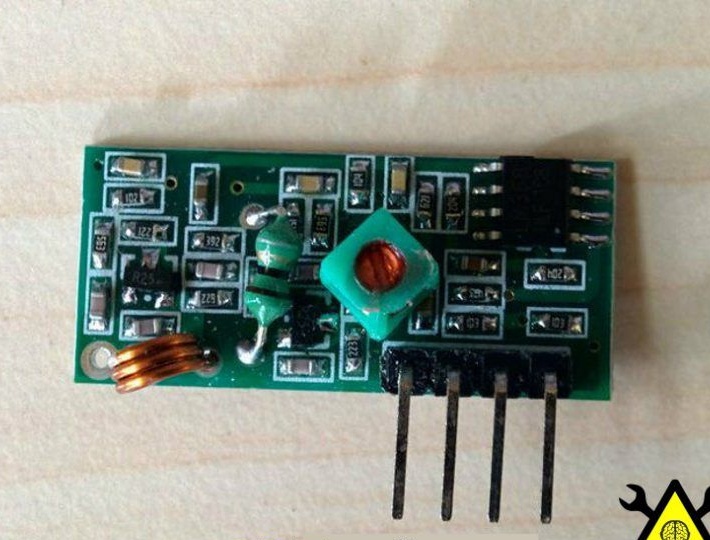
Bản thân người nhận bao gồm:
- Mô đun máy thu RF;
- Bảng mạch Arduino
- Bộ rung (loa).
Mạch thu:
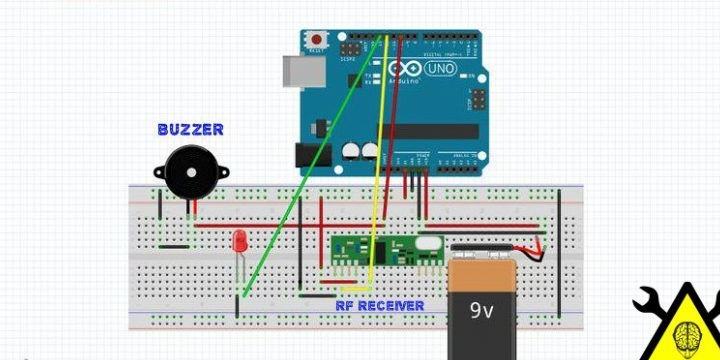
Máy thu, giống như máy phát, có 3 đầu ra (VCC, GND và Dữ liệu), kết nối chúng:
- Đầu ra VCC> 5V trên bảng;
- GND> GND;
- Dữ liệu> 12 pin trên bảng.
Tác giả đã chọn thư viện tập tin làm cơ sở của toàn bộ phần sụn. Tôi đã tải xuống cái mà anh ta và đặt nó trong thư mục với các thư viện Arduino.
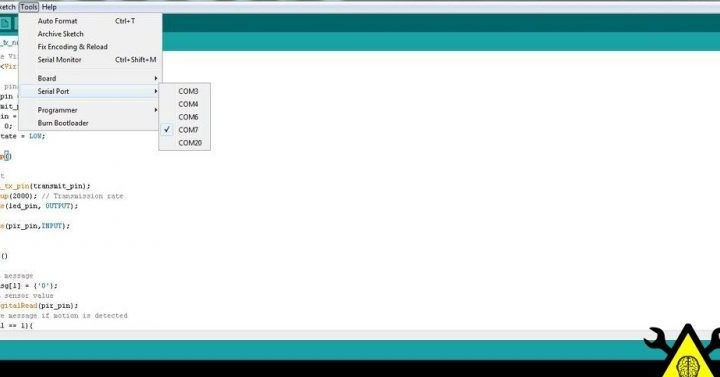
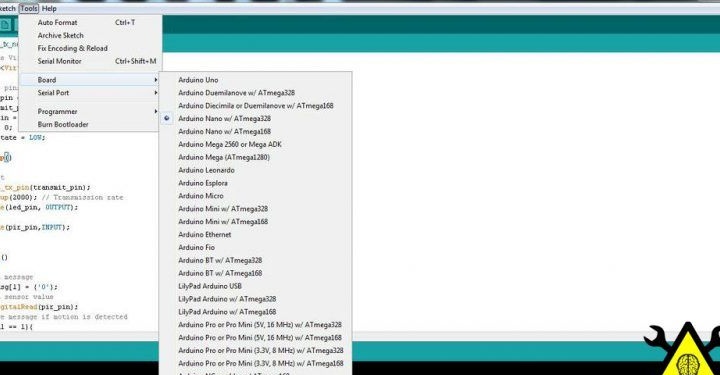
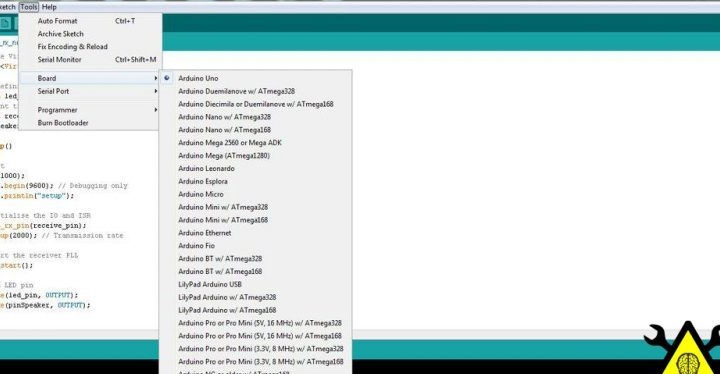
Trước khi tải mã chương trình cơ sở xuống bảng, tác giả đã đặt các tham số IDE sau:
- Bảng -> Arduino Nano (hoặc bảng bạn sử dụng);
- Cổng nối tiếp -> COM XX (kiểm tra cổng com mà bo mạch của bạn được kết nối).
Sau khi thiết lập các tham số, tác giả đã tải xuống tệp chương trình cơ sở Wireless_tx và tải nó lên bảng:
Xem tập tin trực tuyến:

Tác giả lặp lại các bước tương tự cho bảng chủ:
- Bảng -> Arduino UNO (hoặc bảng bạn đang sử dụng);
- Cổng nối tiếp -> COM XX (kiểm tra cổng com mà bo mạch của bạn được kết nối).
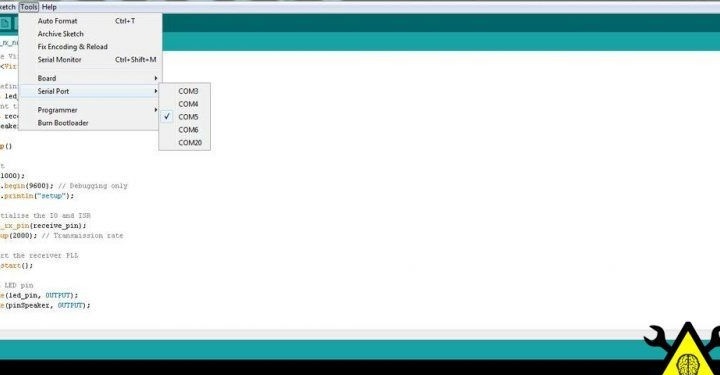
Sau khi tác giả đã thiết lập các tham số, tải xuống tệp Wireless_rx và tải xuống bảng:
Xem tập tin trực tuyến:
Sau đó, bằng cách sử dụng một chương trình có thể được tải xuống, tác giả đã tạo ra âm thanh cho tiếng chuông.
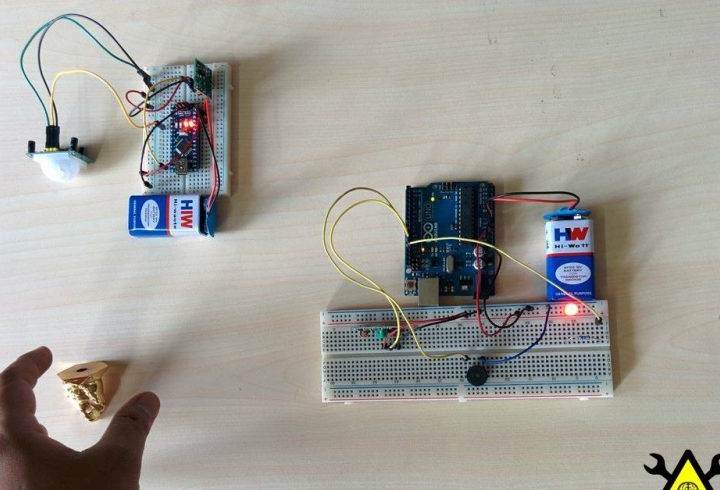
Hơn nữa, sau khi tải xuống phần mềm, tác giả quyết định kiểm tra xem mọi thứ có hoạt động tốt không. Tác giả đã kết nối các nguồn năng lượng, và đưa tay ra trước cảm biến, và một cái chuông bắt đầu làm việc cho anh ta, điều đó có nghĩa là mọi thứ hoạt động như bình thường.
Máy phát cuối cùng
Đầu tiên, tác giả cắt bỏ các kết luận nhô ra từ máy thu, máy phát, bảng arduino, v.v.
Sau đó, tôi kết nối bảng arduino với cảm biến chuyển động và bộ phát RF bằng cách sử dụng bộ nhảy.

Hơn nữa, tác giả bắt đầu làm nhà ở cho máy phát.
Đầu tiên, anh ta cắt ra: một lỗ cho công tắc, cũng như một lỗ tròn cho cảm biến chuyển động, và sau đó dán nó vào vỏ.


Sau đó, tác giả đã gấp một tờ giấy màu, và dán nó vào bìa trước của hình ảnh để che giấu các phần bên trong của sản phẩm tự chế.

Sau đó, tác giả bắt đầu nhúng điện tử nhồi bên trong vỏ, sử dụng băng keo hai mặt.


Lắp ráp cuối cùng của máy thu
Tác giả đã quyết định kết nối bảng Arduino với bảng mạch bằng băng cao su, đồng thời cài đặt bộ thu RF.
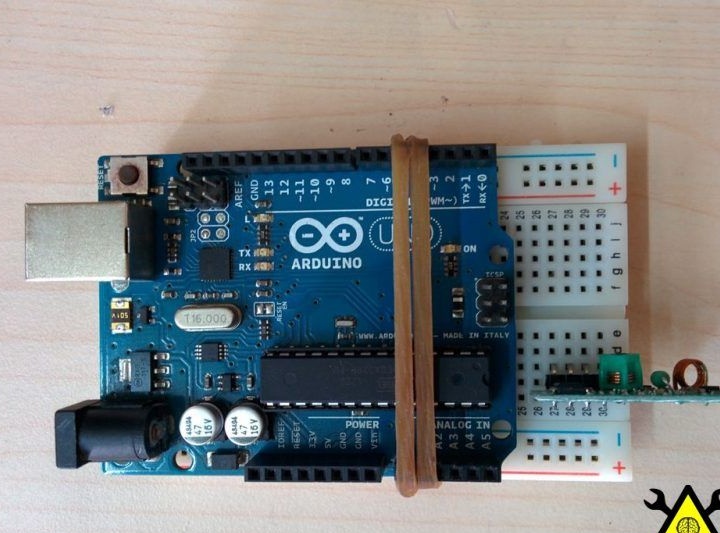
Hơn nữa, tác giả cắt ra hai lỗ trên trường hợp khác, một cho còi và một cho công tắc.

Và gậy.

Sau đó, tác giả cài đặt jumper trên tất cả các chi tiết.

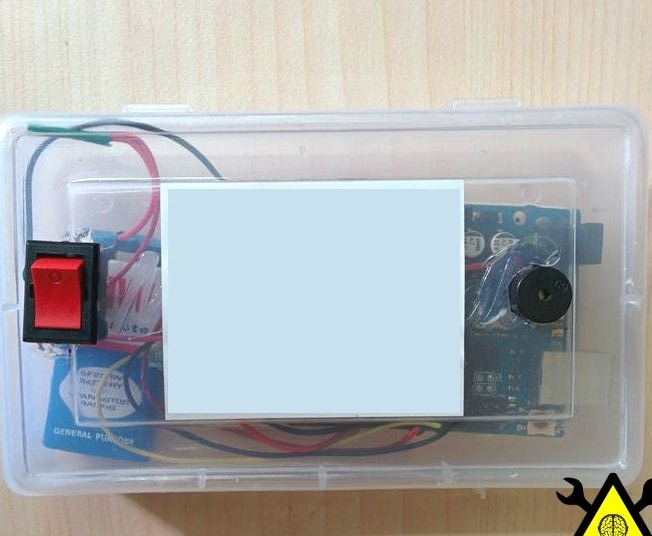
Sau đó, tác giả chèn tấm ván đã hoàn thành vào vỏ máy, và sửa nó bằng keo hai mặt.

Hơn nữa, vì cả hai mô-đun được đặt trong nhà ở, tác giả đã đặt máy phát ở nơi cần được bảo vệ và máy thu đến bàn của mình.
Phạm vi hoạt động của các mô-đun không lớn lắm, và do đó, khi tìm thấy một lỗ được đánh dấu là "con kiến", tác giả đã quyết định tăng bán kính hành động bằng cách thêm ăng-ten vào mỗi mô-đun.


Sau đó, anh bắt đầu xem xét ăng-ten anh cần bao lâu.
Để tính độ dài ăng-ten, bạn cần xác định bước sóng và để làm điều này, bạn cần chia tốc độ ánh sáng theo tần số, sau đó chia số kết quả cho 4. Tác giả có tần số 433 MHz và tốc độ ánh sáng 3 * 10 ^ 8 m / s.
Khi đó bước sóng = (3 × 10 ^ 8) / (433 × 10 ^ 6) = 0,69284 m.,
Và chiều dài ăng ten = 0,69284 / 4 = 0,1732 m = 17,32 cm
Sau đó, tác giả cắt hai mảnh có độ dài mong muốn và hàn chúng vào các lỗ trong mỗi mô-đun.




Và cuối cùng, anh ta nhận được một báo động không dây dựa trên arduino.
